LABORATORY熱の実験室
- 熱の実験室
- 元祖 熱の実験室
元祖 [熱の実験室] 第40回 - Raspberry Piで2点測定の温度制御-2
「熱の実験室」のコーナーでは、熱を利用した身近な実験を行なっています。
第40回(2021年6月)の実験
前回(第39回)は、Raspberry Pi を使用した2点測定により、ON-OFF制御でも、ヒーターから離れていて温度変化が遅れる物体の温度制御を、かなり良好に行えそうなことが確認できました。
温度を一定に制御しようとする場合、ヒーターをON-OFFするのではなく、ヒーター出力を連続的に変化させます。この比例制御を2点測定でやるとどうなるか、試してみました。
温度を一定に制御しようとする場合、ヒーターをON-OFFするのではなく、ヒーター出力を連続的に変化させます。この比例制御を2点測定でやるとどうなるか、試してみました。
● 比例制御とは
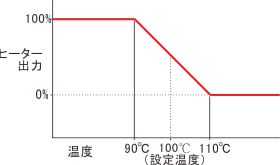 ON-OFF制御では、設定温度と測定した温度を比較して、ヒーターの出力を0%または100%にするので、温度は常に上下することになります。これを改善するため、ヒーターの出力を0%から100%まで、連続的に変化させるのが、比例制御です。
ON-OFF制御では、設定温度と測定した温度を比較して、ヒーターの出力を0%または100%にするので、温度は常に上下することになります。これを改善するため、ヒーターの出力を0%から100%まで、連続的に変化させるのが、比例制御です。例えば、100℃に設定した時に、測定した温度が90℃までは100%、110℃以上なら0%、90℃から110℃の間は、100%~0%で直線的にヒーターの出力を変化させます。測定温度が設定温度(100℃)と同じなら出力が50%になりますが、50%で安定する温度は100℃からズレるので、設定温度との間には差が生じます。実用的な温度制御では、これを別動作で補正しています。
● 使用する機器
前回(第39回)と同じです。

温度制御基板
Raspberry Pi Zero W
 シリコンラバーヒーター
シリコンラバーヒーター
+ アルミ板 ヒーター側

シリコンラバーヒーター
+ アルミ板 熱電対側
Raspberry Pi Zero W に、Apache(Webサーバー)を載せてあり、パソコンやスマートフォンから Wi-Fi 経由で操作できるようにしてあります。
シリコンラバーヒーターは、アルミ板の下端に両面テープで貼りました。反対面は、ヒーター中心とアルミ板の上端から15mmの位置の2か所に、熱電対(温度センサー)をアルミ粘着テープで固定しています。下側の熱電対(tc1)はヒーター温度測定、上側の熱電対(tc2)は、ヒーターで加熱される物体を想定した温度測定用です。
- コンピューター: Raspberry Pi Zero W
- 温度制御基板: Kタイプ熱電対入力 × 2、負荷(ヒーター)駆動は、SSR(DC5V)
- シリコンラバーヒーター:□100mm 60W
- アルミ板:150mm × 200mm × 厚さ1mm
温度制御基板
Raspberry Pi Zero W
シリコンラバーヒーター+ アルミ板 ヒーター側
シリコンラバーヒーター
+ アルミ板 熱電対側
シリコンラバーヒーターは、アルミ板の下端に両面テープで貼りました。反対面は、ヒーター中心とアルミ板の上端から15mmの位置の2か所に、熱電対(温度センサー)をアルミ粘着テープで固定しています。下側の熱電対(tc1)はヒーター温度測定、上側の熱電対(tc2)は、ヒーターで加熱される物体を想定した温度測定用です。
● 実験方法
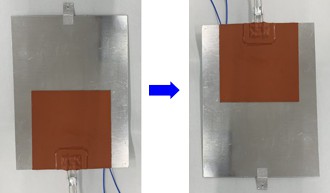 実際に加熱処理するときの条件が、いろいろと変化する影響を見るため、まずヒーターを下にして吊った状態で制御・測定し、途中で逆さ(ヒーターが上)にします。ヒーターの熱による自然対流で、tc2がヒーターの上にあるときの方が、下にあるときより高い温度になるはずです。これを条件の変化としました。
実際に加熱処理するときの条件が、いろいろと変化する影響を見るため、まずヒーターを下にして吊った状態で制御・測定し、途中で逆さ(ヒーターが上)にします。ヒーターの熱による自然対流で、tc2がヒーターの上にあるときの方が、下にあるときより高い温度になるはずです。これを条件の変化としました。温度制御方式は、測定温度が設定温度より5℃低いと100%、5℃高いと0%の比例制御です(測定温度が設定温度と同じときは50%)。
2つの熱電対の測定値により、加熱される物体を想定したtc2の測定値を、60℃にできるだけ安定させるようにプログラムして、制御・測定で確認します。
- 1
- 2