LABORATORY熱の実験室
- 熱の実験室
- 元祖 熱の実験室
元祖 [熱の実験室] 第28回 - ラズパイ2で機械式温度コントロール
「熱の実験室」のコーナーでは、熱を利用した身近な実験を行なっています。
第28回(2015年11月)の実験
カードサイズのコンピューター、ラズパイ2(Raspberry Pi 2)は、サーボモーターを動かすこともできます。このサーボモーターを使って、ヒーターと加熱する物体の距離を変える方法で温度コントロールしてみました。
通常の温度コントロールは、ヒーターに加える電圧を ON-OFF することで行いますが、今回の方法は、火にかけたフライパンが熱くなりすぎないように、適当に上げ下げするのを、自動でやるイメージです。
通常の温度コントロールは、ヒーターに加える電圧を ON-OFF することで行いますが、今回の方法は、火にかけたフライパンが熱くなりすぎないように、適当に上げ下げするのを、自動でやるイメージです。
● 実験に使用した器具
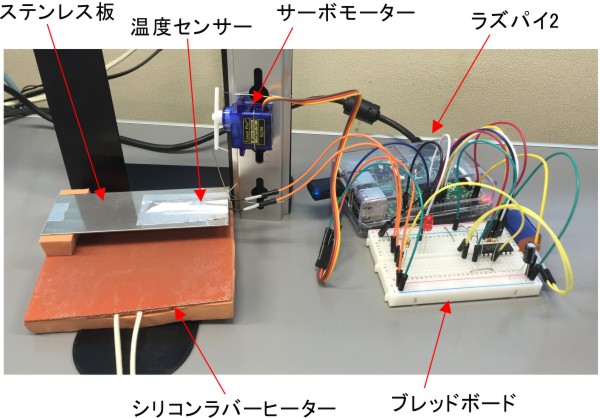
- ラズパイ2(Raspberry Pi 2 Model B)
- ブレッドボード
ラズパイ2の GPIO(入出力端子)に、サーボモーターやADコンバーターなどの回路を接続しています。 なお、上の写真にある LED とボードの右にある青い物体(照度センサー)は、今回使用していません。 - サーボモーター
任意の回転角度に制御できるモーターです。ステンレス板を上下させます。 - シリコンラバーヒーター
100mm × 100mm。10mmの断熱材(シリコーンスポンジ)を下側に貼ってあります。通電すると、約150℃になりました。 - ステンレス板(36mm × 100mm × 厚さ0.8mm)
加熱する物体です。左側は、10mmのシリコンーンスポンジに載せています。右側だけサーボモーターの回転により上下します。 - 温度センサー(サーミスタ)
温度で電気抵抗が変化する素子です。ステンレス板の上に、アルミ粘着テープで固定しました。
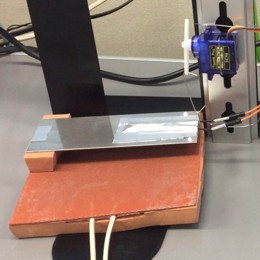
● 予備確認
ステンレス板の上下位置により、何℃になるか確認しました。
温度センサーで検知した温度は、一番下がった左の状態で、約 70℃、一番上がった右側の状態では、約 55℃になりました。
 |
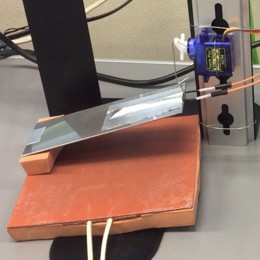 |
| 下がった状態。右側の高さ 10mm。 | 上がった状態。右側の高さ 35mm |
- 1
- 2