LABORATORY熱の実験室
- 熱の実験室
- 元祖 熱の実験室
● 制御例-3(60℃)
完成とした制御例-3ですが、条件が変わっても安定した制御ができないと、本当の完成とは言えないので、設定温度を60℃に下げてみました。
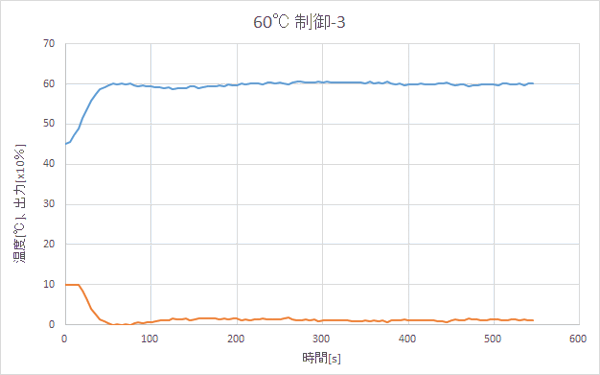
制御・測定周期:5秒、安定後の温度範囲: 59.5~60.6℃(温度差 1.1℃)
70℃と同様、安定した温度になるまで時間がかかっていますが、70℃で、一度上がった後に安定したのと逆で、下がった後に安定しています。
制御・測定周期:5秒、安定後の温度範囲: 59.5~60.6℃(温度差 1.1℃)
● 制御例-3(80℃)
80℃に上げてみました。
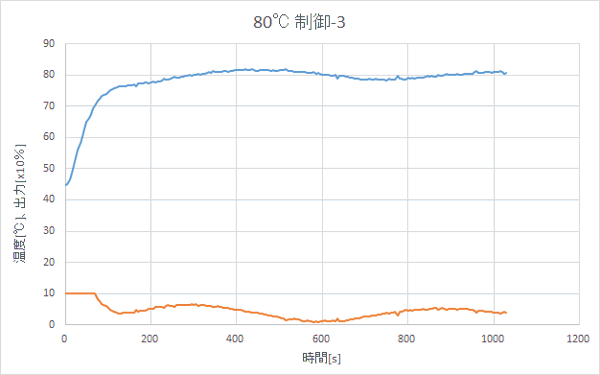
制御・測定周期:5秒、安定後の温度範囲: 78.3~81.9℃(温度差 3.6℃)
安定せず、大きな波になってしまいました。設定温度が上がると放熱が多くなるので、同じ出力での温度上昇が遅くなります。設定温度の調整を徐々にやることが裏目に出て、必要なタイミングより大きく遅れ、温度の波を作る動作をしてしまったようです。
制御・測定周期:5秒、安定後の温度範囲: 78.3~81.9℃(温度差 3.6℃)
● まとめ
一般的には、安定した温度制御をするためには、比例(P)に加えて、積分(I)と微分(D)をする、PID制御が行なわれています。今回の実験では、そのような確立されたやりかたをせず、場当たり的にプログラムしました。PID制御も、あらゆる条件でうまく働くわけでありませんが、ラズパイ2では、自在にプログラムできるので、条件に合わせた温度制御もできるはずです。
プログラムは自由自在ですが、そのプログラムでの温度制御の方は、なかなか自由自在にならないことが、良くわかりましたので、今回の題名は最後に「プログラム」を付けて、「ラズパイ2で自在に温度調節( プログラム)」になりました。
プログラムは自由自在ですが、そのプログラムでの温度制御の方は、なかなか自由自在にならないことが、良くわかりましたので、今回の題名は最後に「プログラム」を付けて、「ラズパイ2で自在に温度調節( プログラム)」になりました。